The Z-Wave Alliance is funding my writing of a blog that describes how to develop a Z-Wave product. The “Journey” is a series of ten blog postings with step-by-step descriptions of how to develop a Z-Wave product from idea to volume production. The full blog posting is on the Alliance web site but here is an abbreviated version.
Introduction
A Z-Wave Developer’s Journey is a series of ten blogs on the nuts and bolts of creating and bringing to market a wireless IoT product utilizing Z-Wave. The series provides a step-by-step roadmap for an engineering team to bring their idea from the concept to a product ready for volume manufacturing. Naturally, this series can’t delve into every aspect of the process but leverages vendor training, documentation and Github to flesh out the details. The journey focuses on Z-Wave end devices but a similar process would be followed by Z-Wave controllers. One thing to note is that everything is constantly changing. The Z-Wave specification continues to evolve with new Command Classes and updates to existing ones, the vendor Software Development Kits (SDKs) have new releases every few months and new silicon chips are always being released. While the guidance shared here is relevant today, details will inevitably evolve over time, so stay engaged and enjoy the ride.
Topics
The journey begins with this blog which describes the topics to be discussed in this ten-part series. You have the opportunity to comment on these topics as each is published. Feel free to comment or reach out to me directly at DrZWave@DrZWave.blog. I continue to learn by doing and enjoy exchanging best-in-class techniques for IoT product development of both hardware and software even in “retirement”. Below is a list of planned topics though the list may morph somewhat along the way based on your feedback. Don’t be shy, comment below or send me an email.
Which Z-Wave chip should you use for your project? Of course, the answer is… depends. The main challenge with the ZG23 is the limited amount of flash and RAM. The SDK uses virtually all the available resources. If your product is fairly simple, like a door/window sensor, the ZG23 should be fine. If you are designing a thermostat or door lock, I would recommend either the ZG28 or the CZ20. If you use the Silicon Labs QFN48 you can develop using the ZG28 and then potentially reduce cost by switching to the pin compatible ZG23 if the code fits. The ZG23 could also work out if you connect an external serial flash chip for the OTA image. That frees up half of the 512KB of flash for your application but it’s still tight on RAM. The ZGM230 module is easier to manufacture since the crystal is calibrated at the factory but is limited to +14dBm transmit power thus effectively cutting the RF range in half. The choice of Silicon Labs or Trident IoT is a more nuanced choice based on the support and relationship you have with the vendor.
Feel free to comment below or contact me with your thoughts or topics you need answers!
Save the DATE! EMEA Z-Wave Unplug Fest and Summit Vienna, Austria, May 27-29.
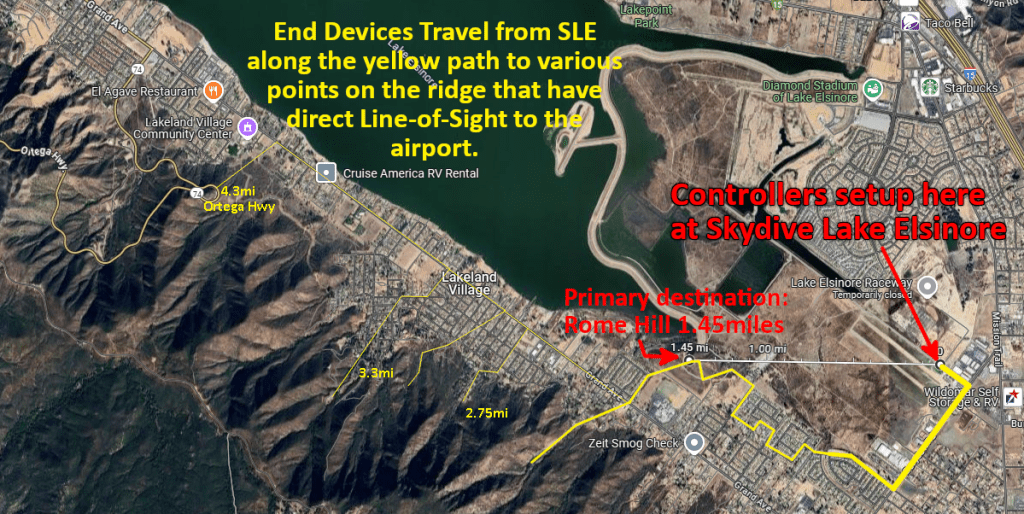
Z-Wave UnplugFest 2025 will be held at the Lake Elsinore Skydive center in California October 28, 2025. Here are a few things you need to know before heading out to test your Z-Wave device and your BRAVERY!
Before You Head to Unplugfest
IF YOU HAVE A Battery Powered End Device (FLiRS or Sleeping EM4):
Your End Device MUST have the Listening Bit Set and thus be an Always-On device
Temporarily alter your firmware to be Always-On. In SSv5 open the <project>.SLCP file, Click on Software Components, Scroll down to Z-Wave, Click on Role Types, Install Z-Wave Role Type Always On, You can switch it back later or make a copy of your project specifically for Unplugfest
We will be using ZRADmini boards with a GPS receiver to track the exact location during Z-Wave Long Range testing. Your device does NOT have to support Geographic Location V2. Your device will be one of up to 2 other devices that will be tracked using a GPS enabled ZRADmini during RF Range Testing. However, for the maximum accuracy of RF Range testing you can add GeoLocV2 with a GPS module to your end device
If your End Device can be powered via USB-C, we will have that covered, otherwise bring sufficient batteries for several hours of continuous operation
Your End Device must have a visible QR code and PIN on it – all devices will be joined with S2 Authenticated or Access keys
Bring your own source of POWER – Especially for Controllers
We hope to have limited amount of 120VAC power from the Skydive center BUT maybe not!
Better to bring your own battery inverter like a Jackery
Are you brave enough to go skydiving?
Signup here – Recommend you book online ahead of time!
Arrive by Monday – the bus LEAVES at 9:00am SHARP Tuesday morning on a 75 minute drive
Bring extra units, WSTK to reprogram units, firmware project, extra cables, batteries, tape, etc.
Plan on things failing so bring extras! Unplugfest always seems to follow Murphys Law
Timeline for the 2025 Z-Wave UnplugFest
8:00am – Gather at hotel Cassara lobby and board the bus at 8:45
If weather permits, JonLuke West will skydive while tracking altitude via GPS
If you’re brave enough, join him on a tandem jump via Skydive Elsinore!
Must be booked in advance which YOU must call and arrange yourself!
Or soar in a 17m sailplane however the plane is metal which may block RF
Eric will have one ZRAD as a Controller and another as an End Device with Geographic Location V2 and a GPS receiver to track the exact locations of up to 3 additional devices at a time
DUTs can run standard firmware (without needing GeoLocV2) and will confirm their range using fully secure Get/Report while obtaining the GPS coordinates from ZRAD
All devices must be joined with S2 Authenticated Security enabled and US Long Range
Noon Box Lunch for all who registered for Unplugfest
3:00pm Testing Ends – Board Bus
3:15pm SHARP – Bus departs
Wrap Up discussion – 3:30pm-4:30pm on the bus
Discussion with all attendees on findings and general discussion of Unplugfest, Z-Wave, development tools, the market, the latest football scores, and the best beer in Carlsbad
The Z-Wave Summit kicks off in the hotel at 5:30pm
The 2025.6 Silicon Labs SSDK Z-Wave release changes the familiar DEBUGPRINT utility to ZPAL_LOG. A brief mention of the change is in the Important Changes for the Z-Wave 7.24.0 release however I’ll give a more detailed description of what has changed and how to use this new utility. If you’re trying to upgrade a project from an earlier SDK, this “breaking change” will make that effort more difficult as you have to switch any DPRINT statements to the new ZPAL_LOG format.
DEBUGPRINT
First a little history. The DEBUGPRINT utility came from the original early 2000s Zensys code running on the 8051 8-bit CPU. From the initial 100 series thru the 500 series, DEBUGPRINT was the ONLY debug utility we had! Even though this was the 2000s thru most of the 2010s, debugging using PRINTF was obsolete by the late 1980s – but not for Z-Wave. PRINTF would print out a short message and maybe a hex value or two and we would try to divine what was going on from these tiny details. There were no breakpoints, no ability to single step the CPU or watch RAM or registers change as the code was executing. Because sending characters out the UART would block the CPU until the UART was empty, you could only send a few characters and maybe a hex value. Sending more characters out the UART would alter the flow of the program and either mask the bug or break something else or often cause a watchdog reset! UGH. While primitive, it was all we had and we made do. DEBUGPRINT was easy to enable or disable – just #define DEBUGPRINT in the file you needed the print statements and recompile. Typically, only a few print statements were enabled at a time or the UART would spew out too much detail or messages would get mixed together making gibberish of the output.
Debugging Today
Debug is much easier with the modern ARM CM33 processor on todays Z-Wave chips. We have Single-Wire-Debug (SWD) and can set breakpoints, watchpoints, single step, view memory and peripherals. There’s even Trace where every instruction executed is logged enabling the precise flow of a program to be viewed after the trigger condition of a bug. We still have DEBUGPRINT which is handy for printing out high level messages like “eReset Reason=3′ each time the chip reboots. These messages are handy during debug and were easy to remove prior to building the final production code simply by commenting out the #define.
ZPAL_LOG
The Z-Wave Log component in a Simplicity Studio project .slcp file is installed by default in all the sample applications starting with the 7.24 release. This is good thing and a bad thing. It’s good since it’s already installed and printing messages before you’ve started modifying the code for your project. It’s bad because when you should remove this code for the final production build, we’ll get into that shortly.
General
When you Configure the Z-Wave Log component you get a lot of radio buttons to switch various features on or off. The first block “General” includes:
Size of the buffer (default is 96 bytes) – Leave this as-is
Display log level – prints 3 characters identifying Info, Debug, Warnings or Error messages
Display log source component – prints a number which identifes which module the print statement is from
Display log timestamp – prints a decimal number of ticks since reset
Enabling any of these messages slightly increases the total FLASH usage. The bigger problem is that it increases the number of characters sent out the UART potentially causing the CPU to block and thus changing the program flow. I recommend leaving these at their defaults.
The Display Log Source component would be useful IF SSv5 decoded the numeric value for you and displayed the name in the console window. Unfortunately it just prints a number which you then must manually decode by looking up the value in the enumerated type zpal_log_component in the zpal_log.h file. The trick would be to send just the numeric number out the UART (thus not taking up significant amounts of time or FLASH) and then SSv5 expanding it to the component name. I have suggested this to the SSv5 team in the past but hasn’t yet come to fruition. The source component is useful if there are several similar or even identical PRINT statements in different blocks of code to help identify where it is coming from. Also if you enable a lot of PRINT statements, it can help narrow down which block a specific message is coming from.
If you enable all 3 of these switches you get: “000000023 [I] (1) ApplicationInit eResetReason = 7”. Where the 00000023 is the timestamp; [i] is the Log Level (Info in this case) and (1) is the component which you have to then decode yourself as mentioned above (ZPAL_LOG_APP in this case) .
Output Channels
The next block is the Output Channels which can enable the four levels of messages: Debug, Info, Warning and Error messages. The default has just Info enabled with the word “vcom” entered into the Info box. I recommend enabling all four of these by entering “vcom” into all four of them. This will increase FLASH usage as the strings for all these messages are now stored on-chip.
Component Filtering
The final configuration block in the Z-Wave Log component is the Component Filtering section. This section has a bunch of radio buttons you can enable which will turn on various messages from the respective module. If you enable ALL of these, it’ll add about 10K bytes of FLASH so maybe only enable ones you think you need.
UART Blocking
The EUSART is only running at 115200 baud which makes each character take over 10 microseconds to send out the UART. This might seem fast, but when you’re transmitting long strings of characters this can seriously impact the program flow in real time. If the UART buffer fills, the code will stall and wait for more buffer space to fill (see the “while” loop in eusart_tx in sl_iostream_eusart.c). If you’re spitting out a lot of messages, the UART will fill causing the program flow to change potentially masking the bug or sending you down the wrong rathole. The baud rate is easily increased to 1mbps which will speed up the printing by 10X which helps, but you need to be aware of the amount of messages pouring out the limited speed of the UART.
Disabling ZPAL_LOG
Once debugging is complete, the next step is to compile all of these messages out of the production code. Fortunately this is easy – just remove “vcom” from all four of the Output Channels section of the Z-Wave Log component. While this removes most of the code for debug messages, the Command Line Interface (CLI) is still there and the EUSART is still used by the sample applications. When developing your own application you will typically want to remove ZPAL_LOG and the CLI as it’s not something your application needs – it is only for the Silicon Labs demos.
Conclusion
Why did silabs make this “breaking change”? I don’t have specific insights from Silicon Labs but the new format provides easily configured “levels” of logging. Is that worth a “breaking change”? I wish they’d spend more time testing the code to reduce the bugs than making a lot of file changes tweaking features that don’t really improve the developers experience. If you’re going to change an important feature, it’s also important to document it which is sorely lacking. But I hope this post helps you utilize this new feature and not be quite so frustrated when updating your project to the latest SDK.
The EFR32ZG23 Z-Wave 800 series MCU has limited FLASH and RAM available for the application. The 800 series actually has less FLASH than the 700 series which stored the bootloader in a dedicated 16K memory. Worse, the bootloader in the 800 series has grown from 16K to 24K! Features are always being added to the SDK making it ever larger leaving less for the application. Seems like Silicon Labs needs to spend some time squeezing the code instead of constantly adding features.
Here is the typical error message when FLASH overflows:
Description
FLASH memory overflowed !
make: *** [makefile:114: all] Error 2
make[1]: *** [makefile:123: SwOnOff_2024120_ZG23B_GeoLoc.axf] Error 1
region `FLASH' overflowed by 92 bytes
SwOnOff_2024120_ZG23B_GeoLoc.axf section `.nvm' will not fit in region `FLASH'
We can’t create more FLASH on the chip, it has what it has. But, there’s always software we can change! By default, the project has ZAF->Z-Wave Release installed which sets the C compiler optimization to -Os which optimizes for size which is probably what we want since we’re out of FLASH. However, deep in the configuration files there is the definition for SL_BOOTLOADER_STORAGE_SIZE which changes from 196K to 180Kbytes when NDEBUG is defined. NDEBUG is defined when the Z-Wave->ZAF->Z-Wave Debug component is installed. The question of why BOOTLOADER size is being reduced by only 16K when debug is enabled is unclear to me. However, in my testing, adding the DEBUG component still results in FLASH overflowing but now by 4344 bytes! Obviously the change in Optimization from -Os to -Og (debugging) blew up the code which is expected. I enabled DEBUGPRINT to get debugging information out the UART which increased the flash usage even more.
Since I am debugging and will not be testing OTA at this stage, I don’t care how big the bootloader storage size is since I am not using it. I need more FLASH space for debugging! Simply edit the sl_storage_config.h file and change SL_BOOTLOADER_STORAGE_SIZE from 0x2C000 to 0x20000 to free up another 48K bytes:
// <o SL_BOOTLOADER_STORAGE_SIZE> Size of the bootloader storage.
// <i> Default: 0x20000
// <i> Note that this value is only being used if BOOTLOADER_STORAGE_USE_DEFAULT
// <i> is set to false. This value will control how much of the flash memory
// <i> is reserved for bootloader storage.
#if defined(NDEBUG)
#define SL_BOOTLOADER_STORAGE_SIZE 0x00030000
#else /* defined(NDEBUG) */
//#define SL_BOOTLOADER_STORAGE_SIZE 0x0002C000 - original value
#define SL_BOOTLOADER_STORAGE_SIZE 0x00020000
#endif /* defined(NDEBUG) */
Now the project fits comfortably in FLASH with plenty of left over space. However, I cannot OTA it and definitely cannot ship it in this way for production. Once I’m done debugging, I’ll have to revert back to RELEASE mode and remove DEBUGPRINT. If FLASH is overflowing that will require some additional effort to squeeze back into the available space. I would first try Link-Time-Optimization (-flto) to the C compiler but that can introduce some instability and require significant amounts of testing time. Next, try looking for code you don’t need and remove it. After that, complain to Silicon Labs they need to shrink their code!
Ram usage : 65532 / 65532 B (100.00 %)
Flash usage : 446868 / 491520 B ( 90.92 %)
RAM usage is at 100% is OK because the HEAP is expanded to fill the available space. But there is very little left over for the application as any RAM usage is making the HEAP smaller. The HEAP is used for all sorts of things like temporary variables, buffers and FreeRTOS. I am very concerned that some of the bugs in Z-Wave products are due to heap overflows. Heap overflows are very difficult to reproduce and debug as they typically require several failures to happen at just the right time. Unfortunately these failures seem to happen with regularity in the real world.
Hope this helps you get back to debugging quickly. Leave me a comment below with your helpful hints that I can include in a future post.
Geographic Location Command Class was introduced around 2014 but it appears no one ever implemented it. How do I know no one implemented it you ask? Because version 1 is not particularly useful. I asked the Z-Wave Certification manager to search the certified database and no product has ever claimed support for it. The problem with V1 is that the 16-bit coordinates limit the resolution to about two kilometers. Two kilometers is sufficient to determine the time for sunrise or sunset, but not to locate a device within a home or yard. With the arrival of Z-Wave Long Range where devices could be placed in an area as large as twelve square miles, we need a way for the device to store and report its location within a few meters or less. Thus, while the first pass (version 1) has some usefulness, with new technology (ZWLR) we have new needs and thus there is a need for a new version of Geographic Location CC. Updating a command class demonstrates the living document nature of the Z-Wave specification and how you and I can add new features to the standard!
Resolution of a Location on the Earth
The circumference of the earth is about 40,075,000 meters. There are 360 degrees of longitude so each degree is 111,319 meters. The earth isn’t a perfect spheroid but for our purposes, a sphere is close enough. In embedded systems with limited resources, we need to represent the latitude/longitude with enough bits for sufficient accuracy to meet our needs. I propose a resolution of approximately one centimeter which is certainly more than enough and currently beyond the resolution of todays (but not tomorrows) low-cost GPS receivers.
The current Z-Wave Geographic Location Command Class V1 uses 1 bit for the sign, 8 bits for the Degrees and 7 bits for the Minutes. Since the 7 bits are in minutes instead of a fraction of a degree, the 7-bit value only ranges from 0-60 which means there are actually less than 6 bits of resolution. Thus, the resolution of the current V1 is 111319m/60=1.855km. Two kilometers of resolution isn’t enough to locate a device within a single Z-Wave network.
How many bits are needed for 1 centimeter resolution?
Degree Fraction Bits
Resolution
Comments
0
111,319m
1 degree=111km
1
55,6560m
2
27,830m
3 … 16
…
Each bit doubles the resolution
17
0.85m
18
0.42m
19
0.21m
20
0.11m
21
0.05m
22
0.03m
23
0.01m
Centimeter resolution
GPS Coordinate Degree Fraction Bits of Resolution
The proposal is to update Geographic Location CC to V2 and make the values 32-bits to achieve roughly 1 centimeter resolution. Using only fractional degrees gives more resolution with fewer bits and is easier to compute. We need 8 bits to represent Longitude from 0 to 180 plus the sign bit for a total of 9 bits. Then another 23 bits for the fraction. Version 1 has the sign bit in the Minutes field which doesn’t make for an easy number to manipulate. We have to bit-swizzle the sign and then divide minutes by 60 to get the fraction. The proposal for V2 is a simple fixed-point fraction as shown below:
Geographic Location SET
7
6
5
4
3
2
1
0
Command Class = COMMAND_CLASS_GEOGRAPHIC_LOCATION (0x8C)
Command = GEOGRAPHIC_LOCATION_SET (0x01)
Lo Sign
Longitude Degree Integer[7:1]
Lo[0]
Long Fraction[22:16]
Longitude Fraction[15:8]
Longitude Fraction[7:0]
La Sign
Latitude Degree Integer[7:1]
La[0]
Lat Fraction[22:16]
Latitude Fraction[15:8]
Latitude Fraction[7:0]
Altitude[23:16] MSB
Altitude[15:8]
Altitude[7:0] LSB
Geographic Location CC V2 proposal
Longitude/Latitude
Longitude and Latitude formats are the same with a sign bit, 8 bits of integer Degree and 23 bits of fraction. The values are signed Degrees which for longitude varies from -180 to +180 and for latitude varies from -90 to +90. The rest of the bits are a fraction of a degree which yields roughly centimeter resolution.
Altitude
Altitude is a twos-complement signed 24 bit integer which yields a maximum of 83km in centimeters (more than enough!) to as much as -6,000km which is the radius of the earth. Note that altitude can be negative as the altitude is relative to sea level. Most GPS receivers will provide altitude so why not include it here in the Z-Wave standard? We need altitude because ZWLR devices could be spaced out vertically as well as horizontally.
Geographic Location GET
Geographic Location GET is the same as the existing V1.
7
6
5
4
3
2
1
0
Command Class = COMMAND_CLASS_GEOGRAPHIC_LOCATION (0x8C)
Command = GEOGRAPHIC_LOCATION_Get (0x02)
Geographic Location REPORT
7
6
5
4
3
2
1
0
Command Class = COMMAND_CLASS_GEOGRAPHIC_LOCATION (0x8C)
Command = GEOGRAPHIC_LOCATION_REPORT (0x03)
Lon Sign
Longitude Integer[7:1]
Lon Int[0]
Long Fraction[22:16]
Longitude Fraction[15:8]
Longitude Fraction[7:0]
Lat Sign
Latitude Integer[7:1]
Lat Int[0]
Lat Fraction[22:16]
Latitude Fraction[15:8]
Latitude Fraction[7:0]
Altitude[23:16] MSB
Altitude[15:8]
Altitude[7:0] LSB
Qual
RO
Al Valid
La Valid
Lo Valid
REPORT is the same as SET with the additional STATUS byte
Status Byte
The additional Status byte provides additional information about the long/lat/alt values:
Qual: From the NMEA GPS Quality Indicator: GPS receivers need a minimum of four satellites to compute the location. Thus, QUAL is the number of satellites used for the most recent computation. If more than 15 satellites are used, then the value is clamped to 15. The values 0-3 are reserved for debugging.
RO: Read Only – Long/Lat/Alt are Read-Only when set to 1. Devices with GPS receivers set this bit to indicate that the values are from an on-board sensor. SET commands are ignored. Devices without a GPS receiver clear this bit to zero and will have their location set at commissioning time typically using a phone to set the GPS coordinates.
Al Valid: The Altitude value is valid when set to 1. When cleared to 0, the Altitude value is unknown and MUST be ignored.
La & Lo Valid: Each bit signifies when the Latitude and Longitude values are valid. When cleared to zero, the Latitude or Longitude MUST be ignored.
If a SET command was sent, the Longitude, Latitude and Altitude is then considered valid and is retained thru a power cycle but will be cleared if excluded or factory reset.
GPS Receiver to Geographic Location Conversion
All GPS receivers use the NMEA 0183 standard for reporting the coordinates. The string of ASCII characters for longitude and latitude is defined to be [D]DDMM.MMM[M] where D is decimal degrees and M are the miutes. The MM.MMMM value must be divided by 60 to convert minutes into fractions of a degree.
The repository implements Geographic Location CC in an end-device such as the Z-Wave Alliance ZRAD project or on a Silicon Labs Devkit using a QWIIC I2C based GPS receiver like the M8Q from Sparkfun.
See the repo for more examples and details. The official Z-Wave Alliance specification update with GeoLocV2 is currently being reviewed and expected to be published in one of the 2025 releases.
Heat Map Examples
One of the drivers to create GeoLocV2 is to generate heat maps of the RF Range for testing Z-Wave Long Range. In previous Unplugfests we use a very subjective measurement of having an LED stop blinking when out of range. Often the LED would pause, but then start blinking again, then stop so it was difficult to determine the exact edge of RF range. With GeoLocV2 we can map the exact locations where the device is when it is able to make 100% error free, encrypted connection.
The Silicon Labs Works With 2024 conference produced a fantastic video (featuring DrZWave! – well, I have a supporting role) demonstrating GeoLocV2 in action on a motorcycle! Skip to minute 43:40 (about 3/4 of the way thru the video) to see the video.
Below is a heat map from a skydiving test that we will be producing a video in the near future. Z-Wave Long Range demonstrated 2.7 mile range – straight UP! A ZRAD was used as the controller running Z-Wave JS and a small Javascript program to extract the GeoLoc data from a commercial Z-Wave device using a PCB antenna stuffed inside a fanny pack of the jumper. This example demonstrates the need for the Altitude in the specification.
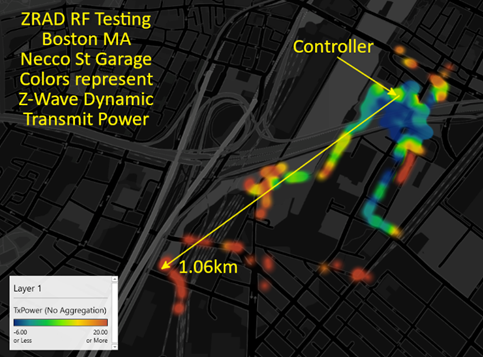
Below is a heat map with the color showing the transmit power needed to make an error free connection which ranges from -6dBm to +20dBm. The test took place in a residential neighborhood outside Boston Massachusetts where the ZRAD controller is in a wood frame building on the second floor and a ZRAD End Device was driven around the neighborhood reaching a general 500m and a maximum of over 1.4km. This demonstrates the dynamic power of Z-Wave Long Range where it saves battery power anywhere within 100 meters but can extend the range thru many obstacles to over a kilometer.
Be sure to attend the upcoming Z-Wave Unplugfest and Summit in Barcelona Spain in February 2025 or the one in Carlsbad CA in April to see GeoLocV2 in action.
The Z-Wave Summit & UnPlugFest took place last week in Austin TX. If you missed it, here is a quick Recap. I organized the UnPlugFest on Tuesday which included an RF Range test down the Colorado River right in downtown Austin. The Z-Wave Alliance Reference Application Design (ZRAD) won the maximum range with a distance of 1.1miles (1.7km) which wasn’t quite line-of-sight (LOS). I produced a video of the event which you have to be a member of the Alliance to gain access. Virtually all of the other Z-Wave Long Range Devices tied in a close second place at 0.7mi (1.1km) however we had limited LOS points to test at bridges across the river. We proved that PCB antennas and shipping Z-Wave devices in a noisy RF environment can easily achieve over a kilometer of range. Note that we measured the range where we are getting 100% corruption free, fully encrypted packets at 100kbps. Obviously we could go much farther if we are just trying to get a NOP to ACK but that’s not useful even though other protocols use that as their yardstick.
The Open Source Work Group met in-person in the afternoon to work on finalizing User Code Command Class. Additional Range testing was measured inside the hotel (with concrete floors) where most devices were able to pass thru several floors. Late in the afternoon was the Fireside Chat where we aired our hope, desires and disappointments for Z-Wave. Watch for a survey coming out soon!
Tuesday evening is the network event which was hosted by Silicon Labs where all the Z-Wave personalities meet and renew friendships and business relationships.
My presentation on the Z-Wave Alliance (ZWA) Reference Application Design (ZRAD) is a preview of the soon to be released github project. There were lots of presentations on all sorts of IoT related topics. You can find the presentation on the ZWA members web site.
FUN! Electric Shuffle
After the UnPlugFest and a full day of presentations it was time to relax and join the competition at Electric Shuffle.
Summit Takeaways
This is my personal set of takeaways. Please add yours in the comments below!
Z-Wave is very much alive!
Lots of new products have been certified and more are in the pipeline
Most are Z-Wave Long Range
Z-Wave spec and Open Source Code continues to improve
Z-Wave Long Range is indeed Long Range!
Over 1mi LOS in downtown Austin – over 2mi proven in NH
Certification for an SDK Update is Review ONLY!
No need to redo the entire certification process to update the Z-Wave SDK
Previously a full re-cert was required ($$$!)
Now you can get the latest bug fixes/security patches and just file paperwork for cheap
Can add Z-Wave Long Range (ZWLR) to a device and keep the same FCCID
Can OTA devices already in the field to add ZWLR!
Requires working with the “right” FCC test house and FCC must be redone with the new frequencies
Talk to Trident for more details
Why is the RF range so short in the EU for many devices?
500 series devices can only transmit at -1dBm (hardware limitation)
700/800 can transmit at +14! More than twice the range!
Update those EU devices!
USB Zniffer firmware can capture BOTH ZWLR frequencies
Select US_LR_END_DEVICE for the region to get ONLY the 2 ZWLR channels (no mesh channels)
Select US_LR_BACKUP to get the ZWLR B channel and mesh channels
Select US_LR to get ZWLR A channel and mesh channels
Z/IP Gateway has a maintenance release expected in June but there will probably only be 1 more maintenance release before it EOLs
You’ve finished designing a new PCB for your Z-Wave product and are now ready to start testing with your own custom firmware. Well, the first thing you need are bootloaders. The bootloader is a standalone application that handles upgrading the application firmware among other things. Downloading a bootloader into a Silicon Labs devkit is easy, just click on “run”. But for custom PCBs you must build it from the source code. There are two types of bootloaders needed: One for End Devices which will receive the updated firmware image over the radio, the other is for Controllers which will receive the image via the UART wires. These are similar but there are a few important differences. This post is specifically for the Z-Wave 800 series and GSDK 4.4.1. Hopefully the process will be a little easier in a future release.
End Device Bootloader – OTA
Fortunately the End Device bootloader is easy with the release of GSDK 4.4.1 (Z-Wave 7.21.1). Plug your board into a ProKit (WSTK) via the Tag-Connect connector. The WSTK should show up in Simplicity Studio v5 (SSv5) Launcher Perspective with “custom board” and the EFR32ZG23 part number on your board. Click on Detect Target if not. Ensure the Debug Mode is set to Mini (or OUT for WSTK1). Select the debug adaptor then start the New Project Wizard via File->New. Make sure the latest SDK is selected and GCC12 (not GCC10). Click on Z-Wave to filter the list and uncheck Solution Examples. Scroll down to “Bootloader – SoC Internal Storage (For Z-Wave Applications)” and select that. Click Next then rename the project to something more meaningful with the chip (ZG23A) and GSDK version (_411 for 4.1.1) for example. Build the project which should complete without error. The bootloader has a lot of security options but I recommend using the defaults. If you have a complex device and need additional code space, you can relocate the OTA buffer to an off-chip serial flash chip which will free up nearly 200K of FLASH space but no additional RAM.
Controller Bootloader – OTW
This example uses a custom PCB and the EFR32ZG23A (mid-security) chip. I start with this combination as that is what most customers will start with. Using one of the devkits causes SSv5 to automagically “know” all sorts of things about the board and what GPIOs are wired to what and what other features are available. When you pick this chip, there are zero pre-built “demos” as all of the current devkits have B (high-security) parts on them.
Start the New Project Wizard via File->New. Ensure the IDE/Toolchain is GCC12 and not GCC10. scroll down and click on the “Bootloader – NCP UART XMODEM (for Z-Wave Applications)” then click on Next. This will create a project called bootloader-storage-internal-single-zwave then append the GSDK version to that which in this case is 4.4.1 so add “ZG23A_441” to the project name to keep track of which chip and which GSDK this is for. Click on Finish then build the project. This will fail because SL_SERIAL_UART_PERIPHERAL_NO is not defined as well as several other things related to the UART.
Clearly the UART needs to be configured but a guide is needed to figure out what that might be. Plug in a Devkit and build the same project but with a different name. This project builds just fine so search for SL_SERIAL_UART_PERIPHERAL_NO. btl_uart_driver_cfg.h has a define for this for USART0. The same file in the custom project says “bootloader UART peripheral not configured”. Obviously somehow it needs to be configured. The .slcp file has Platform->Bootloader->Drivers->Bootloader UART Driver configured.
We don’t need RTS/CTS as they are not used. Configure the custom project with USART0, RX=PA09 and TX=PA08 then the project compiles. This should be the default since you MUST use a UART for XMODEM. Maybe a future release will fix this! There are other configuration items under the Bootloader Core component but generally these can remain at the defaults.
Conclusion
Bootloaders are critical to being able to field-upgrade the firmware of any Z-Wave product which is mandatory for certification. See the Bootloader Users Guide (UG489) for more details on the many options available. The process to create the Z-Wave bootloaders is a bit more complicated than it should be but I hope this guide will bring your Z-Wave product to market a little quicker. Let me know what you think by commenting below.
Silicon Labs Simplicity Studio v5 (SSv5) has a steep learning curve but once you’re up the curve it can accelerate an IoT firmware development. However, sharing the project among several engineers isn’t as straightforward as it should be. Fortunately it is actually quite easy once you know the trick which I explain below.
Step 1 – Create the Repo
Create the repository using Github or your own private server. Typically this is done via a browser which also sets various options up such as the language and the license. Once this has been created, copy the name of the repository to use in the next step.
Step 2 – Clone the Repo locally
Clone the repo onto your computer using the typical “git clone HTTPS://github.com/<gitusername>/<projectName.git>“. Choose a folder on your computer that is convenient. I recommend the folder be under the SSv5 workspace folder which will make finding it later a little easier.
Step 3 – add a .gitignore file
Create a file at the top level of the repo to ignore the files you do not need to put under source code control. Use the lines below and include any other files or folders as needed. You may want to include the .hex, .gbl, .map, and .axf files which are under the GNU* folder or copy them to another folder so you have the binary files in case building the project proves to be difficult. Note that I am NOT checking in the SDK which is huge and Silabs keeps even quite old versions on github and via their website. Thus you don’t need to keep a copy of the SDK on your local servers – but you can if your are that kind of person.
################ Silabs files to ignore ##################### # Ignore the Build Directory entirely GNU* # Other SSv5 files to ignore .trash .uceditor .projectlinkstore *.bak
Step 4 – Create the SSv5 Project
Create the SSv5 project within this folder. Typically this is done using the Project Wizard or selecting one of the sample applications. Be sure to locate the project within the repo folder.
At this point you can either clone the repo into a different folder to see if it works or have a team member clone it onto their computer. Try building the project to see if there are any missing files.
Step 6 – Import the Newly Cloned Repo into SSv5
This is the tricky bit! We’re going to Import the project into SSv5 but the TRICK is to import it into the cloned repo folder. By default, SSv5 will make a COPY of the project when importing. The problem with that is that you then lose the connection to the git repo which is the whole point!
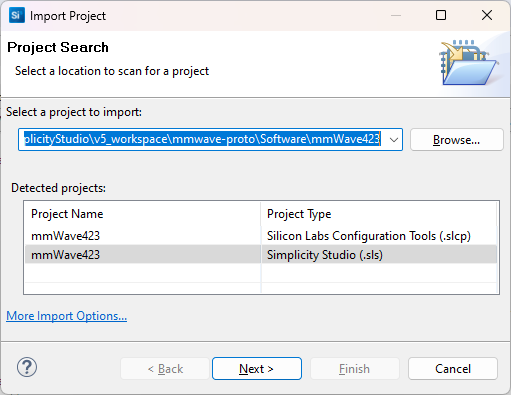
Use “File – Import” then browse to the cloned git repo folder. The project name should show up with a Simplicity Studio .sls file. Select this file by clicking on it then click Next.
Then the next screen pops up. Ensure the proper compiler is selected for the project! GCC10 or GCC12! These settings should come from the .sls so you shouldn’t need to change them.
Click on Next
THIS IS THE MOST IMPORTANT STEP! In the next screen, UNCHECK the “Use Default Location” button! Click on Browse and select the repo folder.
Click on Finish. Then check that the project builds properly.
Team members can now work collaboratively on the project and manage the check in/out and merging using standard git commands.
When the project is complete, be sure everything is checked in and the repo is clean, then in SSv5 right click on the project and select delete. But do not check the “delete project contents on disk” checkbox unless you want to also delete the local repo. This removes the project from the workspace in SSv5 but leaves the files where they are. You can clean up the files later.
The key to using git with SSv5 is to UNCHECK the Default Location button during the import. If you leave that checked, or browse to the wrong folder, SSv5 will make a COPY of all the files and you lose the connection to the git repo.
Debugging a HardFault is ROUGH, but with trace debugging, it’s a joy! A big problem with debugging firmware on a System-on-Chip (SoC) design is that the CPU and memory are encased in a plastic package severely limiting the visibility of what the CPU is doing. There are tons of interrupts and exceptions and just plain old bugs in your software that can send the CPU off into la-la land and you have no way of tracking down how it got there. Good ‘ol PRINTFs do not help since the CPU has gone off the rails. The most common method of debugging this kind of fault is to keep removing code or disabling interrupts until you magically divine the cause by inspection after a lot of tedious narrowing of possible causes and reverting checkins. In this post I’ll describe the joys of debugging using the Segger J-Trace and the Ozone debugger.
ARM CoreSight Architecture
ARM CPUs are intended to be implemented in SoCs so naturally ARM designed in a set of tools to enable visibility and debugging called the CoreSight architecture. For the embedded Cortex processors, and specifically the CM33 in the EFR32ZG23, the key components are the ARM ETMv4 which then feeds the TPIU. The ETM/TPIU tracks the CPU Program Counter (PC), packetizes changes in the PC and thus the program flow, compresses the data, then sends it out the trace pins to an external Trace Port Analyzer such as the Segger J-Trace. The Segger tools decompress and decode the trace data to match it with the image file of the compiled code to show exactly the path the program followed. ARM has a huge amount of documentation on their web site but the problem is there is too much information. ARM has many CPUs, architectures, versions and the entire ETM is an optional component with many configurable parts. This makes reading the ARM documentation much like reading the dictionary, lots of detailed information but it is tough to follow the story of how the pieces work together. Fortunately, Segger has read the documentation and figured out how to make it work.
ARM CoreSight provides CPU visibility using only 2, 3 or 5 pins
Segger J-Trace and Ozone Debugger
Segger is well known in the embedded industry for their J-Link hardware programmers, the Ozone debugger and lots of other services. They have wide support for virtually every MCU made including all of the Silicon Labs EFR32 chips. Their support for Trace debugging is excellent with reliable hardware and software. The Ozone debugger is able to read in your .AXF file out of Simplicity Studio, find all the source code, connect to the DUT via the J-Trace (which includes a J-Link for programming/debug), download the firmware in seconds and run to Main and then display the path your firmware took to get there. Easy and fast!
The SeggerJ-Trace Pro Cortex-M is required for Trace Debugging. While not, cheap, it’s also not expensive compared to the cost of an engineer working for days trying to capture how their firmware dropped into the weeds. The J-Trace connects to your PCB via a 20 pin header that is 50mil on centers so it is quite small. However, I’ve come up with a small PCB that lets you use the standard 10 pin MiniSimplicity header for Trace.
etm_zwave Github Repo and J2Mini Adapter
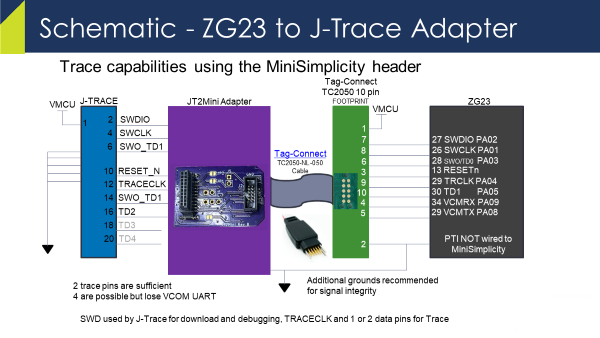
Most Z-Wave IoT products have very small PCBs and no room for another 20 pin header even if it is 50mil. I came up with a simple way to use the existing 10 pin tag-connect/MiniSimplicity header for Trace and placed all the files in a public github called etm_zwave. You do have to connect a couple of extra pins from the ZG23 to the tag-connect/MiniSimplicity header. Replace the PTI pins with the trace clock and a second data pin – the first data pin is the SWO pin already on the header. This header is tiny and you need a way to program the ZG23 anway and this is the way to go. The PTI pins are not that useful as they are only used for radio packet tracing which Z-Wave uses standalone Zniffers instead of wiring multiple nodes to the Network Analyzer. For less than $30 you can build your own JT2Mini adapter boards and then be able to use trace with just the MiniSimplicity header. You will need a extra ground connection as there is a single ground pin on the MiniSimplicity header. I’ll discuss that issue more in the troubleshooting section below.
JT2Mini adapter board plugs directly into the Segger J-Trace and MiniSimplicity cable. It only provides two trace data pins which Segger claims will only occasionally cause the CPU to stall. With 4 pins the CPU will almost never stall. Obviously with only 1 data pin you’ve cut the data rate to get the trace info out of the chip and it will stall (insert wait states) anytime the TPIU fifos will up until they are able to unload the data off-chip.
Setup Trace in Ozone
Now that the hardware is wired up, we have to enable Trace in Ozone.
Open Ozone
Include the *.JlinkScript file in the etm_zwave github repo
For the ZG23 use ZG23_Traceconfig.JLinkScript
There are comments in the file and more info in the repo ReadMe.md on how to properly insert the script into your Ozone *.jdebug project file.
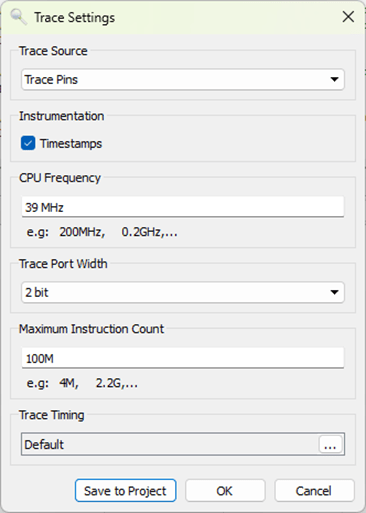
Click on Tools->Trace Settings
Change the Trace Source to Trace Pins
CPU Frequency=39MHz
Trace Port Width=2 (if using JT2Mini)
Click on Green Power button
Ozone will download the code and run to MAIN()
Open the Timeline and Code Profile windows
The TimeLine should look something like this – maybe “run” for just a fraction of a second:
This window shows how long the CPU has been in each function and the complete program flow in real time. Interrupts and switching RToS tasks are shown and make it much easier to immediately find where the hardfault occurred. Clicking in the timeline brings up the exact line of C code and optionally disassembly at that instant in time. You can quickly follow exactly where your code went wrong and the hardfault occurred.
The Timeline window also allows you to immediately see how long each function is taking. What is most important here is checking your interrupt service routines to ensure they are not busy burning a lot of CPU time doing less important work and starving other time sensitive functions. The obvious waster of time is the memset and memcpy functions which I am working on another post about those specific functions so stay tuned!
Ozone has a Code Coverage window which displays the number of lines of code that have been executed and the number of assembly instructions executed. Using this feature with a product validation suite you can quickly identify untested and potentially dead code.
Segger has plenty of training videos that go into a great deal of detail on how to use these tools. But first you need a J-Trace and get it wired up to your board.
How to get printfs via J-Trace
Unfortunately the Segger J-Trace Pro does not support the VCOM serial interface. Thus, if you want to open a terminal window and see the printfs in your code, you have to jumper the Rx/Tx pins (and ground) to a Serial to USB adapter. Fortunately I put a header on the JT2Mini PCB for exactly this purpose. The J5 header has the Rx (Pin 1 square pad) and Tx pins on it (Pin 2 round pad). J3 has ground on both pins. Use an FTDI serial to USB adapter and PuTTY or other serial terminal program to view the printfs. The DevKit EXP pins should be able to read in the serial data but I was not able to find the right combination of In/Out/MCU and AEM/Bat/USB and get SSv5 to work. Thus I recommend using a simple FTDI interface to watch the printfs when tracing.
Troubleshooting
The number one challenge with getting Trace to work is the signal integrity of the clock and the trace data pins. Once you have a clean connection, it seems to be rock stable and produces really valuable debugging data even with just two data pins. If Ozone if giving strange errors and specifically different errors with each run, odds are you have a signal integrity problem.
Yellow is Trace Data1, Green is TRACECLK – GPIOs are at max bandwidth
The EFR32 Series 2 (including the ZG23) GPIOs have only a 20MHz bandwidth. The Trace clock is a divide by 2 of the 39MHz CPU clock so it is running right at the maximum of the GPIO. Trace data is clocked out on both edges of the clock. Since the MiniSimplicity header has only 1 ground on it and there are at least 3 GPIOs toggling at their maximum rates, the signal integrity is marginal even in the best of circumstances. The JT2Mini has extra ground pins and I highly recommend connecting them with additional jumper wire while using Trace. The cable from your board to the JT2Mini should also be no more than 6 inches long. The .JlinkScript file has code in it for adjusting the slew rate of the GPIOs which can improve or possibly degrade the trace signal integrity. Ozone and J-Trace can also adjust the relative timing of the CLK to the data with sub-nanosecond resolution. You’ll have to experiment on your own if you are having problems.
Conclusion
I can’t live without Trace debugging. I don’t necessarily use it all the time but I will wire it up to every board I design in the future! I have spent weeks debugging hardfaults in the past and then solve the problem in 10 minutes using Trace. Get one for yourself!
See many of you next week at the Z-Wave Summit in Orlando Florida where I will be giving a presentation on The Joys of Trace Debugging and running the UnPlugFest on Monday!
Trident IoT is the Host sponsor of the 2023 Z-Wave Members Meeting and UnPlug Fest in Orlando Florida September 18-20. But you may be wondering, who is Trident IoT?
Trident IoT is a technology and engineering company focused on simplifying RF development for connected device manufacturers.
Trident is a brand new company that has just come out of stealth mode today. Founded by Mariusz Malkowski (CTO), Michael Lamb (President), and Bill Scheffler (VP Sales), three IoT industry pioneers with decades of success who understand the complexity of bringing connected products to market. Mariusz and Bill were integral parts of Zensys, the company that invented Z-Wave back in 2000. Michael is an industry veteran bringing hundreds of IoT devices to market at companies like EcoLink, Ring, Comcast, and Honeywell.
Trident has hired several of the key Z-Wave engineering experts in Copenhagen which Silicon Labs recently closed. This talent and additional Trident engineering resources are focussed on bringing additional silicon sources and software to Z-Wave and eventually other wireless IoT protocols. The goal is to provide a much faster and easier path to bring wireless IoT products to market. They will be providing an alternative protocol stack, new footprint compatible modules, second source silicon, certification testing and engineering expertise to quickly bring your new products to market.
Read more details in the Trident press release or better yet, come to the Z-Wave Summit in Orlando in September and talk with the founders in person. Early Registration ends this week so snap up the registration, book the inexpensive hotel and flights and meet us for a good time in Florida! Bring your new devices and hubs to Summit on Monday during UnPlugFest where we plan to test just how far Z-Wave Long Range can reach with real commercial products. Naturally we’ll be testing interoperability as well – you can read more about the proposed agenda for UnPlugFest via this link (this is a link to an Alliance Members only page so you need a login which you can get for free if your company is an Alliance Member).